ControlServomotor40
•Download as PPTX, PDF•
4 likes•13,009 views

Un servomotor es un motor que puede posicionar su eje en ángulos específicos determinados por una señal eléctrica de control, entre 0° y 180°. Contiene un motor de CC, engranajes reductores y un circuito de control que recibe pulsos para posicionar el motor. El servomotor usa modulación de ancho de pulso para indicar su posición angular variando la duración del pulso, generalmente entre 1 ms y 2 ms.

Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Similar to ControlServomotor40
Similar to ControlServomotor40 (20)
Recently uploaded
Recently uploaded (20)
ControlServomotor40
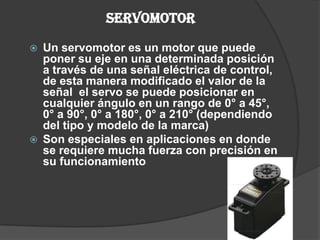
- 1. SERVOMOTOR Un servomotor es un motor que puede poner su eje en una determinada posición a través de una señal eléctrica de control, de esta manera modificado el valor de la señal el servo se puede posicionar en cualquier ángulo en un rango de 0° a 45°, 0° a 90°, 0° a 180°, 0° a 210° (dependiendo del tipo y modelo de la marca) Son especiales en aplicaciones en donde se requiere mucha fuerza con precisión en su funcionamiento
- 2. Interior de un servo
- 3. Motor de corriente continua Es el elemento que le brinda movilidad al servo. Cuando se aplica un potencial a sus dos terminales, este motor gira en un sentido a su velocidad máxima. Si el voltaje aplicado sus dos terminales es inverso, el sentido de giro también se invierte. Engranajes reductores Se encargan de convertir gran parte de la velocidad de giro del motor de corriente continua en torque. Circuito de control Este circuito es el encargado del control de la posición del motor. Recibe los pulsos de entrada y ubica al motor en su nueva posición dependiendo de los pulsos recibidos.
- 4. Como trabaja un servomotor Un servomotor tiene un circuito de control y un potenciómetro (resistencia variable)está conectada al eje central del motor este potenciómetro permite a la circuitería de control, supervisar el ángulo actual del servomotor, si el ángulo es el correcto el servo está apagado y si no es el correcto el servo gira en la dirección adecuada hasta llegar al ángulo correcto
- 5. FUNCIONAMIENTO DE LA SEÑAL DEL SERVO La modulación por anchura de pulso, PWM (Pulse WidthModulation), es una de los sistemas más empleados para el control de servos. Este sistema consiste en generar una onda cuadrada en la que se varía el tiempo que el pulso está a nivel alto, manteniendo el mismo período (normalmente), con el objetivo de modificar la posición del servo según se desee.
- 6. El sistema de control de un servo se limita a indicar en que posición se debe situar. Esto se lleva a cabo mediante una serie de pulsos tal que la duración del pulso indica el ángulo de giro del motor. Cada servo tiene sus márgenes de operación, que se corresponden con el ancho del pulso máximo y mínimo que el servo entiende
- 7. Como comunicarle la posición angular al servo El cable de control se usa para comunicarle al servo el angulo y dicho angulo esta determinado por la duración del pulso VALORES GENERALES DEL PULSO 1 ms y 2 ms de anchura, que dejarían al motor en ambos extremos (0º y 180º). El valor 1.5 ms indicaría la posición central o neutra (90º), mientras que otros valores del pulso lo dejan en posiciones intermedias.
- 9. Codificación de los cables del servo
- 10. Voltaje aplicado Depende del fabricante y modelo del servo, la tención de alimentación puede variar entre 4.8V y 6V
- 11. APLICACIONES En la práctica, se usan servos para posicionar superficies de control como el movimiento de palancas, pequeños ascensores y timones. Ellos también se usan en radio control, títeres, y por supuesto, en robots.
- 12. Circuito para probar el funcionamiento del servo