Nonlinear Systems Term Project: Averaged Modeling of the Cardiovascular System
Output Regulator_LinkedIn
1. Introduction Output Regulation Backstepping Method Backstepping for a Special Case Conclusion
System Description
System Description:
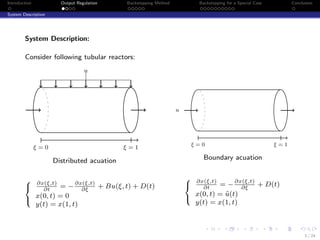
Consider following tubular reactors:
ξ = 0 ξ = 1
u
Distributed acuation
∂x(ξ,t)
∂t
= −
∂x(ξ,t)
∂ξ
+ Bu(ξ, t) + D(t)
x(0, t) = 0
y(t) = x(1, t)
ξ = 0 ξ = 1
u
Boundary acuation
∂x(ξ,t)
∂t
= −
∂x(ξ,t)
∂ξ
+ D(t)
x(0, t) = ˜u(t)
y(t) = x(1, t)
3 / 24
2. Introduction Output Regulation Backstepping Method Backstepping for a Special Case Conclusion
System Description
If
Ax(ξ) = −
∂x(ξ)
∂ξ
Cx(ξ) = x(1) Bx(ξ) = x(0)
Then
˙x(t) = Ax(t) + Bu(ξ, t) + D(t)
y(t) = Cx(t)
˙x(ξ, t) = Ax(ξ, t) + D(t)
Bx(ξ, t) = ˜u(t)
y(t) = Cx(ξ, t)
Manipulation of System with Boundary Actuation
State transformation
x(ξ, t) = P(ξ, t) + B(ξ)˜u(t)
converts the system to
˙xe = Aexe + Beu + DeD
y = Cexe
where
xe =
˜u
P
Ae =
0 0
AB A
Be =
I
−B
Ce = CB C De =
0
I
4 / 24
3. Introduction Output Regulation Backstepping Method Backstepping for a Special Case Conclusion
Exosystem
Exosystem:
˙v(t) = Sv(t)
D(t) = Hv(t)
ytr(t) = Qv(t)
e = y(t) − ytr(t)
Block diagram representation of The system
with IMC
Plant
Exosystem
K
L
x
v
+
+
u y
+
-
ytr
e
Feedback:
for distributed actuation
u(ξ, t) = Kx(ξ, t) + L(ξ)v(t)
leads to
˙x = (A + BK)x + (BL + H)v
˙v = Sv
e = Cx − Qv
for boundary actuation
u(t) = Kxe
(ξ, t) + Lv(t)
leads to
˙xe = (Ae + BeK)xe + (BeL + DeH)v
˙v = Sv
e = Cx − Qv
5 / 24
4. Introduction Output Regulation Backstepping Method Backstepping for a Special Case Conclusion
Exosystem
Objective:
1. The system be stable when v=0 ⇒ Unconditionally held
2. Error becomes zero as time passes ⇒ Readability is required
Readability:
Distributed actuation
x(ξ, t) = Π(ξ)v(t)
Γ = KΠ(ξ) + L(ξ)
Boundary actuation
xe
(ξ, t) = Π(ξ)v(t)
Γ = KΠ(ξ) + L
Constrained Sylvester Equation:
ΠS = AΠ + BΓ + H
CΠ = Q
ΠS = AeΠ + BeΓ + DeH
CeΠ = Q
6 / 24
5. Introduction Output Regulation Backstepping Method Backstepping for a Special Case Conclusion
Exosystem
Results:
Signals generated by exosystem
Error of system with in-domain controller
Error of system with boundary actuation
7 / 24
6. Introduction Output Regulation Backstepping Method Backstepping for a Special Case Conclusion
Exosystem
Results:
Responce of in-domain controller Responce of boundary controller
8 / 24