Halide による画像処理プログラミング入門
•
24 likes•15,765 views

2017/11/16 に開催されました、「画像処理を簡単に高速化してみませんか!?」 Halideによる画像処理プログラミング入門で使用したスライドです。 https://career.levtech.jp/hikalab/event/detail/140/
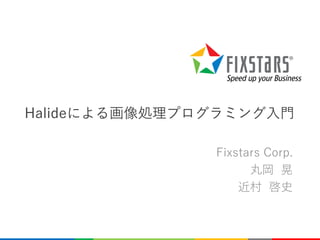
![DeepLearningの台頭
28.2
25.8
16.4
11.7
6.7
3.57
0
5
10
15
20
25
30
2010
NEC America
2011
Xerox
2012
AlexNet
2013
Clarifai
2014
GoogLeNet
2015
ResNet
Top-5Error[%]
ILSVRC ImageNet Classification
1
Deep Neural Networkによる
劇的な精度向上
http://image-net.org/challenges/talks/ilsvrc2015_deep_residual_learning_kaiminghe.pdf](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Halide による画像処理プログラミング入門
Similar to Halide による画像処理プログラミング入門 (20)
More from Fixstars Corporation
More from Fixstars Corporation (20)
Halide による画像処理プログラミング入門
- 2. DeepLearningの台頭 28.2 25.8 16.4 11.7 6.7 3.57 0 5 10 15 20 25 30 2010 NEC America 2011 Xerox 2012 AlexNet 2013 Clarifai 2014 GoogLeNet 2015 ResNet Top-5Error[%] ILSVRC ImageNet Classification 1 Deep Neural Networkによる 劇的な精度向上 http://image-net.org/challenges/talks/ilsvrc2015_deep_residual_learning_kaiminghe.pdf
- 4. 本日の内容 画像認識の高速化・低消費電力化の需要 ムーアの法則の終焉 – ハードウェアが勝手に速くなる時代は終わった – ハードウェアを効率良く使えるソフトウェア開発が必要 画像処理プログラミング言語『Halide』の紹介 – 速く処理出来て – 様々なハードウェアで動かせるプログラムが – 短期間で簡単に開発出来る! 3
- 6. Halide概要 5
- 7. Halideとは 画像処理の高性能計算に特化したDSL (DSL: Domain Specific Language) – http://halide-lang.org/ – C++の内部DSLとして提供 特徴 – アルゴリズムとスケジューリングの分離 – マルチプラットフォーム対応 • x86, ARM, PowerPC, NVIDIA GPGPUなど に対するコード生成が可能 6
- 8. アルゴリズムとスケジューリングの分離 アルゴリズム – 計算部の本質的な処理のみを記述 – ハードウェアによらず単一の記述でよい スケジュール – 計算順序やデータの保持の仕方を記述 – 並列化やループ変形などの最適化もここで記述 – ハードウェアごとに異なるスケジュールを指定可能 7 アルゴリズムとスケジュールの分離が可能
- 9. C++でのナイーブな実装コード 3x3Blurフィルターの実装例 8 void box_filter_3x3(const Image in, Image &blury) { Image blurx(in.width(), in.height()); for (int y = 0; y < in.height(); y++) for (int x = 0; x < in.width(); x++) blurx(x, y) = (in(x-1, y) + in(x, y) + in(x+1, y))/3; for (int y = 0; y < in.height(); y++) for (int x = 0; x < in.width(); x++) blury(x, y) = (blurx(x, y-1) + blurx(x, y) + blurx(x, y+1))/3; }
- 10. C++でのIntel向け手動最適化コード 9 void box_filter_3x3(const Image &in, Image &blury) { __m128i one_third = _mm_set1_epi16(21846); #pragma omp parallel for for (int yTile = 0; yTile < in.height(); yTile += 32) { __m128i a, b, c, sum, avg; __m128i blurx[(256/8)*(32+2)]; // allocate tile blurx array for (int xTile = 0; xTile < in.width(); xTile += 256) { __m128i *blurxPtr = blurx; for (int y = -1; y < 32+1; y++) { const uint16_t *inPtr = &(in[yTile+y][xTile]); for (int x = 0; x < 256; x += 8) { a = _mm_loadu_si128((__m128i*)(inPtr-1)); b = _mm_loadu_si128((__m128i*)(inPtr+1)); c = _mm_load_si128((__m128i*)(inPtr)); sum = _mm_add_epi16(_mm_add_epi16(a, b), c); avg = _mm_mulhi_epi16(sum, one_third); _mm_store_si128(blurxPtr++, avg); inPtr += 8; } } blurxPtr = blurx; for (int y = 0; y < 32; y++) { __m128i *outPtr = (__m128i *)(&(blury[yTile+y][xTile])); for (int x = 0; x < 256; x += 8) { a = _mm_load_si128(blurxPtr+(2*256)/8); b = _mm_load_si128(blurxPtr+256/8); c = _mm_load_si128(blurxPtr++); sum = _mm_add_epi16(_mm_add_epi16(a, b), c); avg = _mm_mulhi_epi16(sum, one_third); _mm_store_si128(outPtr++, avg); } } } } }
- 11. C++でのIntel向け手動最適化コード 10 void box_filter_3x3(const Image &in, Image &blury) { __m128i one_third = _mm_set1_epi16(21846); #pragma omp parallel for for (int yTile = 0; yTile < in.height(); yTile += 32) { __m128i a, b, c, sum, avg; __m128i blurx[(256/8)*(32+2)]; // allocate tile blurx array for (int xTile = 0; xTile < in.width(); xTile += 256) { __m128i *blurxPtr = blurx; for (int y = -1; y < 32+1; y++) { const uint16_t *inPtr = &(in[yTile+y][xTile]); for (int x = 0; x < 256; x += 8) { a = _mm_loadu_si128((__m128i*)(inPtr-1)); b = _mm_loadu_si128((__m128i*)(inPtr+1)); c = _mm_load_si128((__m128i*)(inPtr)); sum = _mm_add_epi16(_mm_add_epi16(a, b), c); avg = _mm_mulhi_epi16(sum, one_third); _mm_store_si128(blurxPtr++, avg); inPtr += 8; } } blurxPtr = blurx; for (int y = 0; y < 32; y++) { __m128i *outPtr = (__m128i *)(&(blury[yTile+y][xTile])); for (int x = 0; x < 256; x += 8) { a = _mm_load_si128(blurxPtr+(2*256)/8); b = _mm_load_si128(blurxPtr+256/8); c = _mm_load_si128(blurxPtr++); sum = _mm_add_epi16(_mm_add_epi16(a, b), c); avg = _mm_mulhi_epi16(sum, one_third); _mm_store_si128(outPtr++, avg); } } } } }
- 12. Halideでのアルゴリズム実装 11 Func box_filter_3x3(Func in) { Func blurx, blury; Var x, y; blurx(x, y) = (in(x-1, y) + in(x, y) + in(x+1, y))/3; blury(x, y) = (blurx(x, y-1) + blurx(x, y) + blurx(x, y+1))/3; return blury; }
- 13. Halideでのアルゴリズム実装 12 Func box_filter_3x3(Func in) { Func blurx, blury; Var x, y; blurx(x, y) = (in(x-1, y) + in(x, y) + in(x+1, y))/3; blury(x, y) = (blurx(x, y-1) + blurx(x, y) + blurx(x, y+1))/3; return blury; } アルゴリズム記述部 アルゴリズムは本質的な処理の内容だけを記述
- 14. HalideでのIntel向け最適化実装 13 Func box_filter_3x3(Func in) { Func blurx, blury; Var x, y; blurx(x, y) = (in(x-1, y) + in(x, y) + in(x+1, y))/3; blury(x, y) = (blurx(x, y-1) + blurx(x, y) + blurx(x, y+1))/3; blury.tile(x, y, xi, yi, 256, 32).vectorize(xi, 8).parallel(y); blurx.compute_at(blury, x).store_at(blury, x).vectorize(x, 8); return blury; } 少ないコード量と期間で簡単に最適化が可能 スケジューリング記述部 アルゴリズムは変更なし
- 15. マルチプラットフォーム向けの最適化 14 Func box_filter_3x3(Func in) { Func blurx, blury; Var x, y; blurx(x, y) = (in(x-1, y) + in(x, y) + in(x+1, y))/3; blury(x, y) = (blurx(x, y-1) + blurx(x, y) + blurx(x, y+1))/3; if (target.has_gpu_feature()) { Var tx, ty; blury.gpu_tile(x, y, tx, ty, 32, 8); } else { blury.tile(x, y, xi, yi, 256, 32).vectorize(xi, 8).parallel(y); blurx.compute_at(blury, x).store_at(blury, x).vectorize(x, 8); } return blury; } 複数のハードウェアに対しても簡単に最適化が可能 GPU用のスケジューリング記述
- 16. Halideのコンパイルフロー 15 Halide Compiler Halide Program C++ Compiler Binary Exec LLVM-IR LLVM C.h.a/.o C/C++ Compiler Host Program BinaryExec(JIT) C/C++ Compiler Binary
- 17. Halideのコンパイルフロー 16 Halide Compiler Halide Program C++ Compiler Binary Exec LLVM-IR LLVM C.h.a/.o C/C++ Compiler Host Program BinaryExec(JIT) C/C++ Compiler Binary Halideで記述された ソースコードをコンパイル
- 18. Halideのコンパイルフロー 17 Halide Compiler Halide Program C++ Compiler Binary Exec LLVM-IR LLVM C.h.a/.o C/C++ Compiler Host Program BinaryExec(JIT) C/C++ Compiler Binary Halideコンパイラによる コンパイルを実行
- 19. Halideのコンパイルフロー 18 Halide Compiler Halide Program C++ Compiler Binary Exec LLVM-IR LLVM C.h.a/.o C/C++ Compiler Host Program BinaryExec(JIT) C/C++ Compiler Binary LLVMバックエンド によるコード生成 コンパイル時実行可能 (JITコンパイル) 実行前にコンパイルも可能 (AOTコンパイル)
- 20. Halideのコンパイルフロー 19 Halide Compiler Halide Program C++ Compiler Binary Exec LLVM-IR LLVM C.h.a/.o C/C++ Compiler Host Program BinaryExec(JIT) C/C++ Compiler Binary Cバックエンドによる コード生成も対応
- 21. アルゴリズム記述 20
- 22. 関数の定義 アルゴリズムは純粋関数として定義される – 関数: Halide::Func – 次元変数: Halide::Var 21 Func f; Var x, y; f(x, y) = x + y; 意味: 関数f は定義域 x, yに対して x + y を値域に持つ 名前空間 Halide:: は以下省略 for (int y=0; y<height; y++) { for (int x=0; x<width; x++) { f[y][x] = x + y; } } 等価なC++ソースコードHalideで書かれたソースコード
- 23. 関数の次元数 最大4次元までの関数を定義可能 22 Func f; Var c, x, y; f(c, x, y) = c + x + y; fは3次元の関数 (e.g. 3D空間, カラー画像)
- 24. 関数の次元数 最大4次元までの関数を定義可能 23 Func f; Var c, x, y; f(c, x, y) = c + x + y; Func f; Var c, x, y, z; f(c, x, y, z) = c + x + y + z; fは3次元の関数 (e.g. 3D空間, カラー画像) fは4次元の関数
- 25. 関数の参照 関数の右辺に定義された関数を記述 右図の定義と同じ意味(合成関数) 24 Func f1, f2; Var x, y; f1(x, y) = x + y; f2(x, y) = f1(x, y); Func f2; Var x, y; f2(x, y) = x + y; 意味: 関数 f2 は定義域 x, yに対して f1(x, y) を値域に持つ 等価
- 26. 式 式はExprクラスの変数として表される – 関数: Func – 次元変数: Var – 式: Expr 25 組み立てた計算式を、式として取っておく事ができる Func f; Var x, y; Expr e = x + y; f(x, y) = e; Func f; Var x, y; f(x, y) = x + y; 等価
- 27. 即値 C++の数値リテラルは式の定義に使用可 – 暗黙的型変換によりExpr型にキャストされる 26 意味: 関数 f はどのような定義域に対しても値域 1 を持つ Func f; Var x, y; f(x, y) = 1;
- 28. RDomと畳み込み関数 リダクションドメイン: Rdom – RDom(min, extent) – 指定された次元で[min, min+extent-1]の領域を動く ループ変数 27 rx は[-1, 1] を動くループ変数 Func f, g; Var x; RDom rx(-1, 3) f(x) = x; g(x) = sum(f(x + rx)); for (int x=0; x<width; x++) { T sum = 0; for (int rx=-1; rx<2; rx++) { sum += x + rx; } g[x] = sum; } 等価なC++ソースコード
- 29. RDomと畳み込み関数 畳み込み関数: – RDomで指定した領域を畳み込んで演算を行う関数 • 例: sum/product/maximum/minimum/argmin/argmax 28 Func f, g; Var x; RDom rx(-1, 3) f(x) = x; g(x) = sum(f(x + rx)); 関数 g は各xにおいて、x-1, x+0, x+1の総和を値域に持つ for (int x=0; x<width; x++) { T sum = 0; for (int rx=-1; rx<2; rx++) { sum += x + rx; } g[x] = sum; } 等価なC++ソースコード
- 30. 領域外アクセス時の参照値設定 BoundaryConditions – constant_exterior: 指定した定数値を参照 – repeat_edge: 袖領域を拡張して参照 – mirror_image: 画像を反転して複製するように参照 – etc… 29 Func f, f_, g; Var x; RDom rx(-1, 3) f(x) = x; f_ = BoundaryConditions::constant_exterior(f, 0) g(x) = sum(f_(x + rx)); 関数 f は定義域 x<0 または x>=width のとき、値 0 を返す
- 32. 2次元Convolution 31 𝐷𝑠𝑡 𝑥, 𝑦 = 𝑘𝑦=0 𝑘ℎ 𝑘𝑥=0 𝑘𝑤 𝑆𝑟𝑐 𝑥 + 𝑘𝑥 − 𝑘𝑤 2 , 𝑦 + 𝑘𝑦 − 𝑘ℎ 2 × 𝐾𝑒𝑟𝑛𝑒𝑙(𝑘𝑥, 𝑘𝑦) 2次元画像の畳み込み処理 – 画像処理において頻繁に用いられる処理 = ∗
- 33. 2次元Convolution 32 例: 画像処理フィルタ – ぼかしやエッジ検出、ノイズ除去などの様々な 画像処理に使用されている 1 16 1 8 1 16 1 8 1 4 1 8 1 16 1 8 1 16 −1 −1 −1 −1 8 −1 −1 −1 −1 = ∗ = Gaussian Kernel Laplacian Kernel ぼかし処理 エッジ検出
- 34. DeepLearningにおけるConvolution Convolutional Neural Network – 画像認識に使用されるニューラルネットワーク – 推論時はConvolution層が全体の処理時間の50%以上を占める • 最近のネットワークではConvolution層の多段化により さらに処理時間が増加 Convolution層の高速化はとても重要! 33 Convolution層 LeNetのネットワーク図 Y. LeCun, L. Bottou, Y. Bengio, and P. Haffner. Gradient-based learning applied to document recognition. Proceedings of the IEEE, november 1998.
- 35. 2次元Convolutionのアルゴリズム記述 C++での実装例 34 void conv3x3(const uint8_t* src, const float* kernel, uint8_t* dst, int height, int width) { for (int y=0; y<height; y++) { for (int x=0; x<width; x++) { float tmp = .0f; for (int ky=0; ky<kh; ky++) { for (int kx=0; kx<kw; kx++) { tmp += src[y+ky-kh/2][x+kx-kw/2] * kernel[ky][kx]; } } dst[y][x] = tmp; } } }
- 36. 2次元Convolutionのアルゴリズム記述 Generator インタフェースに従った記述例 – ターゲットや出力形式、コンパイル時パラメータを コンパイル時に指定可能 35 class conv3x3 : public Generator<conv3x3>{ Var x{"x"}, y{"y"}; public: Input<Buffer<uint8_t>> src{“src", 2}; Input<Buffer<float>> kernel{"kernel", 2}; Output<Buffer<uint8_t>> dst{“dst", 2}; void generate() { RDom r(-1, 3, -1, 3, "r"); Func src_ = BoundaryConditions::repeat_edge(in); dst(x, y) = cast<uint8_t>(sum(cast<float>(src_(x+r.x, y+r.y)) * kernel(r.x+1, r.y+1))); } }; HALIDE_REGISTER_GENERATOR(conv3x3, conv3x3)
- 37. 2次元Convolutionのアルゴリズム記述 Generator インタフェースに従った記述例 – ターゲットや出力形式、コンパイル時パラメータを コンパイル時に指定可能 36 class conv3x3 : public Generator<conv3x3>{ Var x{"x"}, y{"y"}; public: Input<Buffer<uint8_t>> src{“src", 2}; Input<Buffer<float>> kernel{"kernel", 2}; Output<Buffer<uint8_t>> dst{“dst", 2}; void generate() { RDom r(-1, 3, -1, 3, "r"); Func src_ = BoundaryConditions::repeat_edge(in); dst(x, y) = cast<uint8_t>(sum(cast<float>(src_(x+r.x, y+r.y)) * kernel(r.x+1, r.y+1))); } }; HALIDE_REGISTER_GENERATOR(conv3x3, conv3x3) 入出力パラメータ アルゴリズムの記述部 Generatorを登録
- 38. スケジューリング記述 37
- 39. スケジューリングとは ハードウェアの特性に応じて、 性能を向上させるための様々な指定 – 計算タイミングの指定 – スレッド並列化 – ベクトル化 – ループ変形 – etc… スケジューリングはターゲットハードウェア によって達成される効果が異なります – 今回はCPUの場合について紹介します 38
- 40. 計算タイミングの指定 Func::compute_inline (デフォルト) – 出力のFunc以外はインライン展開される • 〇必要メモリ量は少なくなる • ×計算量が増える可能性あり 39 等価 Func blur_x, blur_y; Var x, y; blur_x(x, y) = in(x, y) + in(x+1, y); blur_y(x, y) = (blur_x(x, y) + blur_x(x, y+1)) / 4; Func blur_y; Var x, y; blur_y(x, y) = (in(x, y) + in(x+1, y) + in(x, y+1) + in(x+1, y+1)) / 4;
- 41. 計算タイミングの指定 Func::compute_root – 関数の全領域の計算結果がメモリに保持される • 〇計算量が削減できる可能性あり • ×必要メモリ量は多くなる 40 Func blur_x, blur_y; Var x, y; blur_x(x, y) = in(x, y) + in(x+1, y); blur_y(x, y) = (blur_x(x, y) + blur_x(x, y+1)) / 4; blur_x.compute_root(); blur_xはblur_yを評価する前に全領域が計算される for (int y=0; y<height; y++) { for (int x=0; x<width; x++) { blur_x[y][x] = in[y][x] + in[y][x+1]; } } for (int y=0; y<height; y++) { for (int x=0; x<width; x++) { blur_y[y][x] = (blur_x[y][x] + blur_x[y+1][x]) / 4; } }
- 42. 計算タイミングの指定 Func::compute_at – 指定した関数の次元のループ内で必要な領域のみの 計算結果がメモリに保持される • 計算量・メモリ使用量共に compute_inlineとcompute_rootの中間となる 41 blur_xはblur_yのyループ内で必要な領域が計算される for (int y=0; y<height; y++) { for (int x=0; x<width; x++) { blur_x[0][x] = in[y][x] + in[y][x+1]; blur_x[1][x] = in[y+1][x] + in[y+1][x+1]; } for (int x=0; x<width; x++) { blur_y[y][x] = (blur_x[0][x] + blur_x[1][x]) / 4; } } Func blur_x, blur_y; Var x, y; blur_x(x, y) = in(x, y) + in(x+1, y); blur_y(x, y) = (blur_x(x, y) + blur_x(x, y+1)) / 4; blur_x.compute_at(blue_y, y);
- 43. スレッド並列化 Func::parallel – 指定した次元でループをスレッド並列化 – 各スレッドを異なるコアで実行することで高速化 42 Func f; Var x, y; f(x, y) = x + y; f.parallel(y); Thread 0 Thread 1 x y f Parallelize fの計算が2スレッドで並列に処理される
- 44. ベクトル化 Func::vectorize – 指定した次元とベクトル幅でループをベクトル化 ベクトル化 – SIMD命令を使用するように最適化すること • 1命令で複数のデータを同時に演算可能 • 例: Intel SSE/AVX, ARM NEON, Power AltiVec など 43 Func f, g, h; Var x; f(x) = g(x) + h(x); + g h f 1命令あたり1要素ずつ演算される
- 45. ベクトル化 Func::vectorize – 指定した次元とベクトル幅でループをベクトル化 ベクトル化 – SIMD命令を使用するように最適化すること • 1命令で複数のデータを同時に演算可能 • 例: Intel SSE/AVX, ARM NEON, Power AltiVec など 44 Func f, g, h; Var x; f(x) = g(x) + h(x); f.vectorize(x, 4); + g h f 1命令で4要素が同時に演算される Vectorize
- 46. ループアンロール Func::unroll – 指定した次元に対してループ展開を行う • 分岐命令の削減 • ソフトウェアパイプライニング • レジスタの再利用(レジスタブロッキング) 45 for (int y=0; y<height; y++) for (int x=0; x<width; x++) f[y][x] = x + y; unroll前の等価なC++ソースコード Func f; Var x, y; f(x, y) = x + y;
- 47. ループアンロール Func::unroll – 指定した次元に対してループ展開を行う • 分岐命令の削減 • ソフトウェアパイプライニング • レジスタの再利用(レジスタブロッキング) 46 Func f; Var x, y; f(x, y) = x + y; f.unroll(x, 2); for (int y=0; y<height; y++) for (int x=0; x<width; x+=2) { f[y][x] = x + y; f[x+1][y] = x+1 + y; } for (int y=0; y<height; y++) for (int x=0; x<width; x++) f[y][x] = x + y; unroll前の等価なC++ソースコード Unroll後の等価なC++ソースコード Unroll
- 48. タイリング Func::tile – 指定した次元とタイルサイズでループをタイル化する • データの再利用性を高める ⇒キャッシュやローカルメモリなどを有効活用できる 47 Func f; Var x, y; f(x, y) = in(y, x); f.tile(x, y, xi, yi, 16, 16); for (int y=0; y<height; y+=16) { for (int x=0; x<width; x+=16) { for(int yi = 0; yi < 16; yi++) { for(int xi = 0; xi < 16; xi++) { f[y+yi][x+xi] = in[x+xi][y+yi]; } } } } Tile後の等価なC++ソースコード
- 50. 2次元Convolutionのスケジュール記述 Generator インタフェースに従った記述例 – schedule関数内にスケジューリングを記述 49 class conv3x3 : public Generator<conv3x3>{ Var x{"x"}, y{"y"}; public: Input<Buffer<uint8_t>> src{“src", 2}; Input<Buffer<float>> kernel{"kernel", 2}; Output<Buffer<uint8_t>> dst{"dst", 2}; void generate() { RDom r(-1, 3, -1, 3, "r"); Func src_ = BoundaryConditions::repeat_edge(src); dst(x, y) = cast<uint8_t>(sum(cast<float>(src_(x+r.x, y+r.y)) * kernel(r.x+1, r.y+1))); } void schedule() { } }; スケジューリングを記述
- 51. 性能評価環境 評価環境 – CPU: Intel Core i7-5930K • 周波数: 3.5GHz • 6コア12スレッド • AVX2/FMA3搭載(1命令で256-bit幅の積和演算が可能) – コンパイラ • GCC-6.3.0 (C++実装用のコンパイラとして使用) • Halide: Release-2017_10_31 & LLVM-5.0.0 • コンパイルオプション: -O3 –march=native 2次元Convolution – 入出力: 2048x2048 8-bitグレースケール画像 – カーネルサイズ: 3x3 – カーネル: Gaussianカーネル 50
- 52. アルゴリズム実装のみの性能 66.4 3.61 0 10 20 30 40 50 60 70 ①: C++ ②: Halide ExecutionTime[ms] 51 Halideで実装するだけで18.4倍の速度向上 – Halide版はLLVMで自動ベクトル化されているのを確認 18.4倍
- 53. ループ展開によるレジスタブロッキング 52 通常のConvolution演算 – 出力1画素の計算当たり 入力9画素のロードが必要 dst src unroll前の参照範囲
- 54. ループ展開によるレジスタブロッキング 53 通常のConvolution演算 – 出力1画素の計算当たり 入力9画素のロードが必要 Yの次元でループを展開してみると…? – 出力2画素の計算当たり 入力12画素のロードで済む ⇒ロード命令の削減が可能! dst src dst src unroll前の参照範囲 unroll後の参照範囲
- 55. ループ展開によるレジスタブロッキング 54 スケジューリングの記述 void generate() { RDom r(-1, 3, -1, 3, "r"); Func src_ = BoundaryConditions::repeat_edge(src); dst(x, y) = cast<uint8_t>(sum(cast<float>(src_(x+r.x, y+r.y)) * kernel(r.x+1, r.y+1))); } void schedule() { out.split(y, yo, yi, 4); out.reorder(yi, x, yo); out.unroll(yi); } Y次元で4展開分のループアンロール
- 56. ループアンロール適用後の性能 66.4 3.61 3.17 0 10 20 30 40 50 60 70 ①: C++ ②: Halide ③: ②+unroll ExecutionTime[ms] 55 20.9倍 ロード命令の削減により1.14倍の速度向上
- 57. スレッド並列化 Yの次元でスレッド並列化を適用 56 void generate() { RDom r(-1, 3, -1, 3, "r"); Func src_ = BoundaryConditions::repeat_edge(src); dst(x, y) = cast<uint8_t>(sum(cast<float>(src_(x+r.x, y+r.y)) * kernel(r.x+1, r.y+1))); } void schedule() { out.split(y, yo, yi, 4); out.reorder(yi, x, yo); out.unroll(yi); out.parallel(yo); } Yの次元でスレッド並列化
- 58. スレッド並列化適用後の性能 66.4 3.61 3.17 0.52 0 10 20 30 40 50 60 70 ①: C++ ②: Halide ③: ②+unroll ④: ③+parallel ExecutionTime[ms] 57 127.7倍 スレッド並列化により6.10倍の速度向上 – スケジューリングを4行追加するだけで127.7倍の速度向上
- 59. 参考情報 公式ページ – http://halide-lang.org/ リファレンス – http://halide-lang.org/docs/index.html チュートリアル – http://halide- lang.org/tutorials/tutorial_introduction.html 58
- 61. OpenCVのDNNモジュール 60 DNNモジュールに Halide実装が追加 – ネットワークごとに各層の スケジューリングを定義可能 – IntelCPU上でMKLを使用した 場合と同等程度の性能 https://docs.opencv.org/3.3.0/de/d37/tutorial_dnn_halide.html https://www.slideshare.net/embeddedvision/making-opencv- code-run-fast-a-presentation-from-intel
- 62. NNVM/TVM 61 NNVM – 各種DeepLearningフレームワークで記述されたコードを様々な ターゲットハードウェア向けに最適化・コード生成を行うコンパイラ TVM – テンソル演算用の中間表現スタック – 中間表現としてHalideのIRを拡張し採用 http://www.tvmlang.org/2017/10/06/nnvm-compiler-announcement.html http://tvmlang.org
- 63. Google Pixel2 62 Googleが発表したスマートフォン 画像処理・機械学習用のカスタムSoC 「Pixel Visual Core」を搭載 – 8個のIPU(Image Processing Unit)を搭載 – IPUはTensorFlowとHalideによる開発をサポート https://techcrunch.com/2017/10/17/googles-first-custom-consumer-chip-is-the-secret-behind-the-pixel-2s-camera-performance
- 64. フィックスターズにおける Halideへの取り組み © 2017 Fixstars Corp. CONFIDENTIAL 63
- 65. Fixstars Solutions, Inc.(米国カリフォルニア州、100%子会社) 株式会社アイ・イー・テック(株式会社SHIFTとの合弁会社、当社出資比率:66%) Who am I? © 2017 Fixstars Corp. CONFIDENTIAL 64 フィックスターズとは? マルチコアプロセッサ/フラッシュメモリを駆使して 大量計算や大量データI/Oの高速処理を実現するソフトウェア・パートナーです 事業内容 マルチコアプロセッサ関連事業 設立 2002年8月 資本金 5億4,996万円 (2016年12月末 現在) 社員数 150名(2017年9月末 現在) 所在地 大崎(本社)、横浜 代表取締役社長 三木 聡 主な取引先 東芝、キヤノン、デンソー、日立製作所、日立ハイテクノロジーズ、オリンパス、みず ほ証券、 宇宙航空研究開発機構など 連結子会社 本社:品川区大崎
- 66. Halide to FPGA(Beta)のサイトオープン © 2017 Fixstars Corp. CONFIDENTIAL 65 10月18日にサイトをオープンしています
- 67. Halide to FPGA 概要 GPUCPU FPGA GenesisコンパイラがHalide ベースのプログラムコードを FPGA向けのコードへと変換します Halideアプリケーション プログラム Genesis コンパイラ © 2017 Fixstars Corp. CONFIDENTIAL 66
- 68. FPGA? 67 FPGA:Field Programmable Gate Array 製造後に購入者や設計者が構成を設定できる 集積回路 従来ASICと比較して低速でエネルギー効率が 悪いというデメリットがあったが、製造ルー ル微細化の最先端を走り、ギャップは縮まり つつある 高い並列性のあるアルゴリズムの 実装に適している
- 69. コンパイルフロー 68 Bitstream Netlist RTL Vivado HLS C/C++ Halide 高位合成ツール Genesisコンパイラ 論理合成/配置配線/ タイミング検証ツール © 2017 Fixstars Corp. CONFIDENTIAL ターゲットハードウェアで 一般的なEDAツールを 使用する 従来は手動で行っていた アルゴリズムから 量産用実装への変換を Genesisコンパイラで置き換える RTL生成部は 高位合成ツールに任せる
- 70. ありがとうございました 69