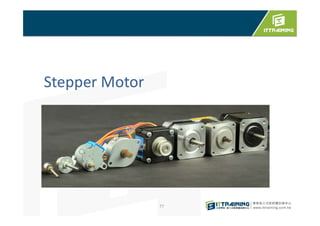
Step motor
•
0 likes•760 views

This document discusses stepper motors, including their types, resolutions, gear ratios, coils, phases, and drive methods. It provides details on a specific 28BYJ-48 5V unipolar stepper motor, including its specifications. It explains half-step sequencing and how stepper motor movement is controlled by pulse signals. Code examples are given for controlling a stepper motor with a Raspberry Pi. The document contrasts unipolar and bipolar stepper motors and their drive methods.

Recommended
More Related Content
What's hot
What's hot (20)
Similar to Step motor
Similar to Step motor (20)
More from 艾鍗科技
More from 艾鍗科技 (20)
Recently uploaded
Recently uploaded (20)
Step motor
- 2. Types of Steppers Motor Size : NEMA 17, 23,.. Resolution: degrees per step Gear ratio: 32:1 , 64:1 • A gear train will also increase the torque of the motor. Some tiny geared steppers are capable of impressive torque. But the tradeoff of course is speed Coils and Phases 78 gear train 6-slots stator 4-slots stator
- 3. 2-phase 79
- 4. 80
- 5. 28BYJ-48 Unipolar Stepper with ULN2003 81 28BYJ-48 – 5V unipolar Stepper Motor • Number of Phase 4 • Stride Angle 5.625° /64 • Speed Variation Ratio 1/64
- 6. if you will give the ULN2003 stepper driver a certain pulse signal, it will drive step motor to a certain angle. The control of Stepper Motor movement angle is done by controlling the number of stepper motor driver pulses. The speed of the stepper motor rotation is also controllable by controlling the frequency of the pulses. 82
- 8. Half step the number of steps per rotation: 4096 Half step: 512x8 Step Pulse Frequency: 1000 step/s One rotation need 40.96 seconds RPM=Frequency*60/4096 • RPM: 1000*60/4096=15 • Frequency=RPM/60*4096 84
- 9. 接線方式 85 GPIO 5 in1 GPIO 6 in2 GPIO 13 in3 GPIO 26 in4
- 10. Code Example cd stepper_motor/step_motor.py python3 step_motor.py 86
- 11. 87
- 12. How does a Stepper Motor work ? https://www.youtube.com/watch?v=eyqwLiowZiU 88
- 13. half step The current has been applied to BOTH coils in an equal amount. This causes the motor shaft to lock into place halfway between the two coils. This would be known as a “half step” 89
- 16. 92 Now to reverse the direction of a unipolar motor you don’t need to reverse polarity. Instead, the negative voltage is applied to the OTHER side of the coil. This causes the current to flow in the opposite direction within the coil and this, in turn, moves the motor shaft in the opposite direction.
- 17. Coils and Phases stepper motor may have any number of coils. But these are connected in groups called "phases". All the coils in a phase are energized together. 93 Bipolar drivers use H-bridge circuitry to actually reverse the current flow through the phases. Unipolar : less torque