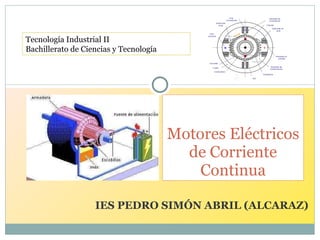
![8.1. Motores de Corriente Continua ,[object Object],[object Object],[object Object],[object Object],Unidad 8. Motores eléctricos En la figura se representa el esquema de una máquina de corriente continua genérica de dos polos, que podría actuar como motor o generador. Los elementos que forman la máquina son:](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Motores CC: tipos, componentes y funcionamiento
Similar to Motores CC: tipos, componentes y funcionamiento (20)
More from jesuspsa
More from jesuspsa (20)
Motores CC: tipos, componentes y funcionamiento
- 1. IES PEDRO SIMÓN ABRIL (ALCARAZ) Motores Eléctricos de Corriente Continua Tecnología Industrial II Bachillerato de Ciencias y Tecnología
- 3. 8.1. Motores de Corriente Continua 5. Rotor: está constituido por una pieza cilíndrica ranurada, formado por chapas de material ferromagnético (generalmente acero laminado con contenido débil de silicio). En sus ranuras se dispone el devanado inducido (bobinas de hilo o de pletina de cobre) 6. Colector de delgas: conjunto de láminas de cobre, delgas , aisladas entre sí por delgadas láminas de mica casi pura y que giran solidariamente con el motor. Cada delga está eléctricamente unida al punto de conexión de dos bobinas del devanado inducido, de forma que habrá tantas delgas como bobinas simples tenga el inducido. 7. Escobillas: piezas de grafito que están en contacto con el colector de delgas, para asegurar el contacto eléctrico con el devanado inducido y los bornes de la máquina con el exterior. El colector de delgas y las escobillas actúan como rectificadores de corriente, de modo que aunque la corriente que circula por el interior de la máquina sea alterna, en el circuito de salida obtendremos corriente rectificada (continua). Las escobillas se disponen sobre una estructura metálica, denominada portaescobillas . 8. Elementos mecánicos de soporte: como los cojinetes o rodamientos 9. Elementos de envoltura. Unidad 8. Motores eléctricos Rotor Delga Escobilla
- 6. 8.2. Tipos de motores eléctricos de c.c. Ejemplo: Un motor de 5 kW tiene una resistencia del inductor de 0,2 Ω , una resistencia del inducido de 1 Ω , una corriente del inducido de 25 A y su fcem es de 200 V. Determinar su rendimiento Unidad 8. Motores eléctricos Solución: El rendimiento de la máquina será: La potencia absorbida será: Hallamos el valor de U, sabiendo que: U = 200+ 0,2•25+ 1•25 = 230 V Así: P ab = 230 • 25= 5750 W Y el rendimiento será: U= E+U Ri +U Rexc P ab = U• I 200 V 0,2 Ω 1 Ω Pu= 5 kW η= P u P ab
- 7. 8.2. Tipos de motores eléctricos de c.c. B) Motores en derivación o Shunt ): en este tipo de motor el inducido y el inductor se conectan en paralelo (Figura 4) Unidad 8. Motores eléctricos El esquema eléctrico equivalente, es Si aplicamos al motor un voltaje externo U , dicho voltaje se repartirá en cada elemento del circuito en serie, y caerá íntegro en la resistencia del inductor (R exc ) Las corrientes del circuito serán: La potencia perdida en los conductores se calcularía: La potencia absorbida por el motor será: U= E+U Ri Cálculos en el circuito equivalente del motor en derivación P cu = I i 2 • R i + I exc 2 •R exc P ab = U• (I i +I exc ) Impt: En el momento del arranque la corriente del inducido aumenta de forma semejante a la del motor en serie, pero el momento de arranque es mucho menor que en el motor en serie (porque le flujo magnético es constante, no depende de la velocidad del motor, ni de la corriente del inducido) U= U Rexc I i = U-E R i Figura 4 Figura 5 I exc = U R exc
- 9. 8.2. Tipos de motores eléctricos de c.c. Unidad 8. Motores eléctricos El esquema eléctrico equivalente, es Las características de este motor son semejantes a las del motor en derivación, ya que las expresiones que se obtienen de su funcionamiento son similares. C) Motores en excitación independiente: en este caso el inductor y el inducido se alimentan de fuentes externas independientes (Figura 6) C) Motor compound: en este caso el motor dispone de dos devanados inductores; uno se conecta en serie y el otro en paralelo con el inducido . En la Figura 8 representamos el esquema del motor Compound largo. En este motor el devanado inductor se divide en dos; el inductor Rexcs que aparece en los esquemas anteriores y el Rexcp que es la parte del devanado que se conecta en paralelo con el inducido. Con esto se consigue un buen momento de arranque ( ventaja de los motores en serie ) ya que el devanado inductor está conectado en serie, y una velocidad estable ( ventaja de los motores en derivación ) ya que el devanado inductor está conectado en paralelo. Figura 6 Figura 7 Figura 8
- 10. 8.2. Tipos de motores eléctricos de c.c. Unidad 8. Motores eléctricos El esquema eléctrico equivalente del motor compound largo se representa en la Figura 8 y el compound corto en la Figura 9. 8.3. Funcionamiento de un motor. Cuando el motor arranca, debe arrastrar la carga que se opone al movimiento del motor (resistencia), y al mismo tiempo vencer la inercia propia del mecanismo del motor. Se generará así un par llamado de arranque. Por tanto el par de arranque debe ser mucho mayor al par resistente (porque el par resistente tiende a aumentar con la velocidad del motor mientras que el par del motor tiende a disminuir con esta). Una vez que el motor empieza a acelerar va aumentando su velocidad hasta que llega al régimen permanente , momento en el que dicha velocidad se estabiliza. Al llegar al régimen permanente el momento del motor será igual al momento resistente. Figura 8 Figura 9
- 11. 8.3. Funcionamiento de un motor. Unidad 8. Motores eléctricos Cuando varían la características de la carga, variará la velocidad del motor y su punto de funcionamiento se moverá, pudiendo ser estable (permanece en el nuevo punto alcanzado) o inestable (el motor funcionaría a tirones) Como en régimen permanente el momento del motor y el resistente son iguales, pero de signo contrario, el momento total del sistema será cero, la aceleración será cero y la velocidad permanecerá constante. M m =M r M total =0 a=0 v= cte Como vemos en la figura el punto de equilibrio o punto donde el motor trabaja a régimen permanente, se determina por la intersección de la curva característica momento-velocidad del motor y la curva momento-velocidad de la carga.
- 12. 8.3.1.Curvas características de los distintos tipos de motores Unidad 8. Motores eléctricos El mayor momento durante el arranque se alcanza en el motor en serie, le sigue el compound y por último el de derivación. En el de excitación independiente el comportamiento es similar al derivación. 1. Curva característica momento-velocidad 2. Curva característica velocidad-corriente Como se muestra en la figura la velocidad más constante se obtiene en el motor en derivación, seguido del compound, y por último, el motor serie. El motor de excitación independiente el comportamiento es similar al derivación. 2. Curva característica momento-corriente En este caso el máximo momento en relación con la corriente , se alcanza en el motor serie, seguido del compound, y por último el derivación. El motor de excitación independiente el comportamiento es similar al derivación.