

Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (20)
Similar to Modele scara
Similar to Modele scara (20)
More from Mouna Souissi
More from Mouna Souissi (20)
Modele scara
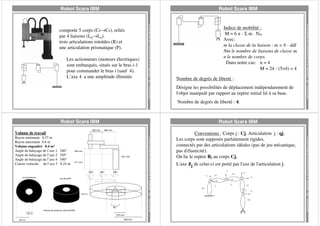
- 1. Jean Michel Olive Nombre de degrés de liberté : 1996 1996 Les actionneurs (moteurs électriques) sont embarqués, situés sur le bras i-1 pour commander le bras i (sauf 4). L’axe 4 a une amplitude illimitée Indice de mobilité : M = 6 n - Σ m . Nm Avec: m la classe de la liaison : m = 6 - ddl Nm le nombre de liaisons de classe m. n le nombre de corps. Dans notre cas: n = 4 M = 24 - (5×4) = 4 Désigne les possibilités de déplacement indépendamment de l'objet manipulé par rapport au repère initial lié à sa base. Jean Michel Olive comporte 5 corps (C0→C4), reliés par 4 liaisons (L0→L4). trois articulations rotoïdes (R) et une articulation prismatique (P). DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Robot Scara IBM DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Robot Scara IBM Nombre de degrés de liberté : 4. Robot Scara IBM 411 mm 540° 340° vue de profil Jean Michel Olive 240 mm 20 ° Volume de travail du robot SCARA 540 mm 800 mm z2 z1 C1 x1 C0 C2 z3 x4 x2 C3 z4 x4 1996 vue de dessus 295° L'axe zj de celui-ci est porté par l'axe de l'articulation j. 270 mm 800 mm DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 651 mm 1996 240 mm Conventions : Corps j : Cj, Articulation j : qj, Les corps sont supposés parfaitement rigides, connectés par des articulations idéales (pas de jeu mécanique, pas d'élasticité). On lie le repère Rj au corps Cj. C4 Jean Michel Olive 340° 295° 540° 0.24 m 480 mm DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 320 mm Volume de travail Rayon minimum 0.27 m Rayon maximum 0.8 m Volume engendré 0.4 m3 Angle de balayage de l’axe 1 Angle de balayage de l’axe 2 Angle de balayage de l’axe 4 Course verticale de l’axe 3 Robot Scara IBM
- 2. Robot Scara IBM Robot Scara IBM •dj : la distance entre les axes zj-1 et zj le long de xj-1 •θj : l'angle entre les axes xj-1 et xj (rotation autour de zj) •rj : la distance entre les axes xj-1 et xj le long de zj Robot Scara IBM La matrice de transformation qui définit le repère R j dans Rj-1 est donnée par : αj dj σj = 0 si l’articulation est rotoïde, σj =1 si l’articulation est prismatique. Robot Scara IBM 2 3 d1 4 z2 d2 y0 , y1 x0 , x1 z3 , z4 σj 0 0 1 0 αj 0 0 0 0 dj 0 d1 d2 0 θj θ1 θ2 0 θ4 rj 0 0 r 0 x2 y2 y3 , y4 x3 , x4 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 1 1996 0 − Sinθ j dj Cosθ j Cosα j Sinθ j Cosα j Cosθ j − Sinα j − r j Sinα j = Sinα j Sinθ j Sinα j Cosθ j Cosα j r j Cosα j 0 0 1 0 j Où d1 et d2 sont des constantes et r une variable. Jean Michel Olive T j = Rot ( X , α j )Trans( X , d j ) Rot ( Z , θ j )Trans( Z , r j ) z0 , z1 1996 αj Jean Michel Olive θj DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Paramètres géométriques du robot (Denavitt - Hartemberg) : dj j −1 θj 1996 •αj : l'angle entre les axes zj-1 et zj (rotation autour de xj-1) La variable articulaire qj associée à l’articulation j, est soit θj soit rj , selon que la dite articulation est rotoïde ou prismatique. Cela se traduit par la relation : qj = (1 - σj )θj + σj rj θ Jean Michel Olive Passage de Rj-1 à R j fonction de quatre paramètres : 1996 Ici les axes zi sont colinéaires. Jean Michel Olive - l'axe zj est porté par l'axe de l'articulation j, - l’axe xj est porté par la perpendiculaire commune aux axes zj et zj+1. DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Paramètres géométriques pour une structure ouverte simple DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Le repère R j est défini comme suit :
- 3. Robot Scara IBM Robot Scara IBM x0 , x1 z3 , z4 x2 y2 x3 , x4 Jean Michel Olive y3 , y4 Robot Scara IBM Robot Scara IBM Le Modèle Géométrique Direct : -S1 C1 0 0 0 0 1 0 0 0 0 1 Notations : ⇒ Ci et Si désignent respectivement le cosinus et le sinus de la variable θi -S2 C2 0 0 j −1 0 0 1 0 d1 0 0 1 T j = Rot ( X , α j )Trans( X , d j ) Rot ( Z , θ j )Trans( Z , r j ) dj − Sinθ j 0 Cosθ j Cosα j Sinθ j Cosα j Cosθ j − Sinα j − r j Sinα j = Sinα j Sinθ j Sinα j Cosθ j Cosα j r j Cosα j 0 0 1 0 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 C1 S1 0 T1 = 0 0 C2 S2 1 T2 = 0 0 1996 − Sinθ j dj 0 Cosθ j Cosα j Sinθ j Cosα j Cosθ j − Sinα j − r j Sinα j = Sinα j Sinθ j Sinα j Cosθ j Cosα j r j Cosα j 0 0 1 0 1996 T j = Rot ( X , α j )Trans( X , d j ) Rot ( Z , θ j )Trans( Z , r j ) DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Le Modèle Géométrique Direct : Jean Michel Olive j −1 Jean Michel Olive y0 , y1 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 d2 Le modèle géométrique direct (MGD) est l’ensemble des relations qui permettent d’exprimer la situation de l’organe terminal du robot en fonction de ses coordonnées articulaires. Pour cela, le calcul du MGD implique de calculer les matrices de transformation de l’organe terminal. Ainsi, à partir du tableau DH et compte tenu des matrices de transformation homogène étudiées, nous écrivons les matrices de transformation homogènes élémentaires iTi+1 de notre robot. 1996 z2 Jean Michel Olive d1 1996 z0 , z1 Le Modèle Géométrique Direct : DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Paramètres géométriques du robot (Denavitt - Hartemberg) :
- 4. Robot Scara IBM Robot Scara IBM 0 0 1 0 dj − Sinθ j 0 Cosθ j Cosα j Sinθ j Cosα j Cosθ j − Sinα j − r j Sinα j = Sinα j Sinθ j Sinα j Cosθ j Cosα j r j Cosα j 0 0 1 0 Jean Michel Olive Robot Scara IBM Le Modèle Géométrique Direct : 0 0 1 0 C2 S2 1 T2 = 0 0 d2 0 r 1 C4 S4 3 T4 = 0 0 -S2 C2 0 0 -S4 C4 0 0 0 0 1 0 0 0 1 0 d1 0 0 1 0 0 0 1 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 0 0 0 1 1996 0 1 0 0 0 0 1 0 Le Modèle Géométrique Direct : Jean Michel Olive 1 0 2 T3 = 0 0 -S1 C1 0 0 0 0 0 1 T j = Rot ( X , α j )Trans( X , d j ) Rot ( Z , θ j )Trans( Z , r j ) Robot Scara IBM C1 S1 0 T1 = 0 0 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 j −1 1996 dj − Sinθ j 0 Cosθ j Cosα j Sinθ j Cosα j Cosθ j − Sinα j − r j Sinα j = Sinα j Sinθ j Sinα j Cosθ j Cosα j r j Cosα j 0 0 1 0 -S4 C4 0 0 1996 T j = Rot ( X , α j )Trans( X , d j ) Rot ( Z , θ j )Trans( Z , r j ) C4 S4 3 T4 = 0 0 Jean Michel Olive j −1 d2 0 r 1 Notations : ⇒ Ci et Si désignent respectivement le cosinus et le sinus de la variable θi ⇒ Cij = cos( θi + θj ), Sij = sin( θi + θj ) 2 T4 = 2T3 × 3T4 = 1 0 0 0 0 1 0 0 C4 S4 2 2 3 T4 = T3 × T4 = 0 0 0 0 1 0 d2 0 r 1 -S4 C4 0 0 x 0 0 1 0 C4 S4 0 0 -S4 C4 0 0 d2 0 r 1 0 0 1 0 0 0 0 1 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 0 0 1 0 1996 0 1 0 0 Jean Michel Olive 1 0 2 T3 = 0 0 Le Modèle Géométrique Direct : DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Le Modèle Géométrique Direct :
- 5. Robot Scara IBM Robot Scara IBM d2C2+d1 d2S2 r 1 C124 S124 0 0 1 T4 = T1 × T4 = 0 0 Robot Scara IBM -S124 C124 0 0 C24 x S24 0 0 0 0 1 0 -S24 C24 0 0 0 0 1 0 d2C2+d1 d2S2 r 1 d1C1+d2C12 d2S1C2+d1S1+d2C1S2 r 1 Robot Scara IBM Le Modèle Géométrique Inverse : Considérons U0 tel que U0 = sx sy sz 0 nx ny nz 0 ax ay az 0 px py pz 1 La matrice U0 est une donnée du problème ; elle correspond à la situation désirée de l’organe terminal dans le repère R0. 1996 Jean Michel Olive Le système d’équations à résoudre est le suivant : U0 = 0T4 1996 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Le Modèle Géométrique Inverse : Jean Michel Olive Le MGD du robot permet de calculer les coordonnées opérationnelles en fonction des coordonnées articulaires. Le problème inverse consiste à calculer les coordonnées articulaires qui amènent l’organe terminal dans une situation désirée, spécifiée par ses coordonnées opérationnelles. Cette opération est très souvent appelée transformation de coordonnée (ou changement de coordonnées ). Lorsqu’elle existe, la forme explicite qui donne toutes les solutions possibles au problème inverse constitue ce que nous appelons le modèle géométrique inverse (MGI). Nous allons utilisés la matrice de passage du repère R0 au repère R4 : 0T4 0 0 0 1 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 0 0 1 0 d2 0 r 1 0 0 1 0 1996 -S24 C24 0 0 0 0 1 0 -S1 C1 0 0 Jean Michel Olive C24 S24 1 T4 = 1T2 × 2T4 = 0 0 0 -S4 C4 0 0 C1 S1 0 T4 = 0T1 × 1T4 = 0 0 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 d1 C4 0 S4 0 x 0 1 0 0 1 0 1996 -S2 C2 0 0 Jean Michel Olive C2 S2 1 T4 = 1T2 × 2T4 = 0 0 Le Modèle Géométrique Direct : DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Le Modèle Géométrique Direct :
- 6. Robot Scara IBM Robot Scara IBM C124 S124 0 0 1 T4 = T1 × T4 = 0 0 Robot Scara IBM d1C1+d2C12 d2S1C2+d1S1+d2C1S2 r 1 d1C1+d2C12 d2S1C2+d1S1+d2C1S2 r 1 et d1C1 + d2C12 = px d1S1 + d2S12 = py (1) (2) En élevant au carré et en additionnant les expressions (1) et (2), nous obtenons : d12 + d22 + 2d1d2 (C1C12 + S1S12) = px2 + py2 ce qui donne : C2 = (px2 + py2 - d12 - d22)/(2d1d2) car C1C12 + S1S12 = C2 d’où : 1 + tan2θ2 = [(2d1d2)/( px2 + py2 - d12 - d22)]2 De plus : 1 + tan2θ2 = 1/C22 ainsi : θ2 = Arctg[±(√1 - C22/C2)] DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 px py pz 1 1996 0 0 1 0 ax ay az 0 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 nx ny nz 0 1996 sx sy sz 0 -S124 C124 0 0 px py pz 1 Le Modèle Géométrique Inverse : Jean Michel Olive C124 S124 0 0 1 T4 = T1 × T4 = 0 0 0 0 1 0 ax ay az 0 Robot Scara IBM Le Modèle Géométrique Inverse : U0 = -S124 C124 0 0 nx ny nz 0 DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 d1C1+d2C12 d2S1C2+d1S1+d2C1S2 r 1 U0 = sx sy sz 0 1996 px py pz 1 Jean Michel Olive 0 0 1 0 ax ay az 0 Jean Michel Olive -S124 C124 0 0 nx ny nz 0 1996 C124 S124 0 0 1 T4 = T1 × T4 = 0 0 sx sy sz 0 Jean Michel Olive U0 = Le Modèle Géométrique Inverse : DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Le Modèle Géométrique Inverse :
- 7. Robot Scara IBM d’où : et : tan (θ1 + θ2 + θ4) = sy/sx θ4 = Arctg (sy/sx) - θ2 - θ1 1996 Enfin, connaissant θ1 et θ2, nous pouvons déterminer θ4. En identifiant les matrices U0 et 0T4, nous pouvons écrire : sx = C124 sy = S124 Jean Michel Olive Les équations précédentes (1) et (2) peuvent s’écrire : d1C1 + d2(C1C2 - S1S2) = px (1) d1S1 + d2(S1C2 + S2C1) = py (2) nous permet d’écrire : C1 = (px + d2S1S2)/(d1 + d2C2) et en remplaçant dans (2), nous en déduisons : S1 = [py (d1 + d2C2) - d2S2px]/[(d1 + d2C2)2 + d22S22] Maintenant, nous remplaçons cette expression dans (1) et nous avons : C1 = [px (d1 + d2C2) - d2S2py]/[(d1 + d2C2)2 + d22S22] Nous pouvons alors en déduire : θ1 = Arctg (S1/C1) DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20 Le Modèle Géométrique Inverse :